
Si vous souhaitez tester à peu de frais un système de suivi automatique de position en temps réel, tracking, il est possible de mettre en oeuvre un kit de développement très facilement. Voici la théorie et la mise en pratique…
Decawave et sa maison mère Qorvo proposent un kit de développement pour tester leurs puces de localisation par la technologie ultra-wide band (UWB 6,5GHz). Avec un kit de 12 puces vous allez pouvoir avoir un ensemble de 4 antennes fixes (Anchors), 1 passerelle (Gateway) pour collecter les informations de position et les transmettre aux appareils qui attendent ces informations (processeur de spatialisation sonore, jeu d’orgue lumière pour de la poursuite asservie, mapping vidéo…) et 7 Tags mobiles dont on va suivre les positions. C’est un exemple chaque puce peut se voir assigné un rôle ou un autre en fonction des besoins.
Si votre plateau est plus grand ou que vous avez besoin de plus de Tags, alors il suffit de commander un second kit et d’ajouter ces autres puces comme Anchors, Listeners (qui transmettent à la passerelle principale) ou Tags.
Les Gateway/Listeners sont montés sur des Raspberry Pi. Qorvo fourni une image du système prêt à l’emploi sur un Raspberry Pi 3B (pour d’autres versions, y compris la 3B+, il faudra compiler et paramétrer les différents logiciels déjà intégrés dans le cas du R.Pi 3B).
Toute la théorie sur l’UWB et le suivi de position en temps réel est expliqué dans ce document sur le site Qorvo. (archive)


Les limites
Un système est limité à 9000 Tags. Il y a déjà de quoi faire !
Il faut un minimum de 4 Anchors.
Chaque Gateway/Listener peut être en contact avec 30 Tags à la fois. Pour de fortes concentrations il faudra ajouter des Listeners.
On peut espérer une portée de 10m à 20m environ. Au delà il faut ajouter des Anchors et des Listeners pour conserver une bonne stabilité.
Un système peut effectuer 150 mesures de position par secondes. Donc pour moins de 15 Tags on peut avoir 10 mesures par Tag chaque seconde (c’est le taux de rafraîchissement le plus rapide). Pour 30 Tags on peut avoir 5 mesures de position par Tag chaque seconde. Pour 150 Tags on aura une mesure de position par Tag chaque seconde. Pour 300 Tags on aura une mesure de position par Tag toutes les 2 secondes. etc.
Les kits de développement Decawave-Qorvo sont interdit à la revente.
Ils n’ont pas de certification ; à charge de l’utilisateur de procéder à ses propres mesures de certification : Procédure européenne / Procédure américaine (USA)
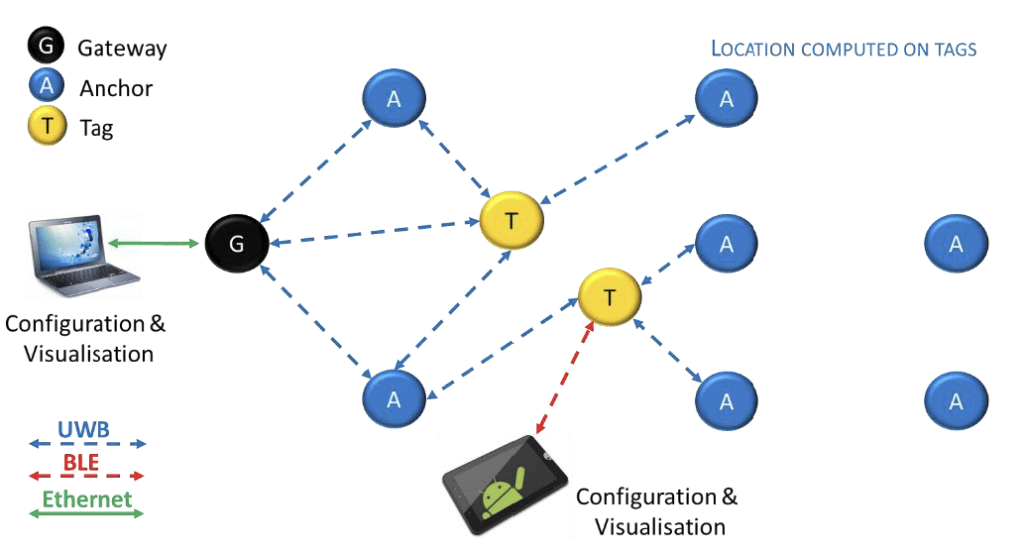
Comment ça marche
Parmi les Anchors, il y a une balise fixe qui est en charge de faire l’appel de chaque Tag à tour de rôle (Initiator).
Lorsqu’un Tag reçoit ce top, il regarde autour de lui quelles sont les 4 Anchors qui le bordent, de préférence pour que le Tag se situe dans un rectangle défini par ces 4 Anchors. Il transmet à son tour un signal à ces 4 Anchors qui lui répondent. La différence de temps de trajet de ces impulsions hautes fréquences va servir à calculer par triangulation la position du Tag relative à ces 4 Anchors dont les positions fixes sont connues.
Une fois les calculs faits la position du Tag est transmise par celui-ci vers la Gateway directement ou par le biais d’un Listener. La Gateway transmet en broadcast par le réseau (Wifi ou LAN) les positions par le protocole MQTT (basé sur json). Vous pouvez convertir le MQTT en PosiStageNet (PSN) ou en OSC grâce à Chataigne.
Les ondes radios hauts-fréquence de l’UWB sont sensibles à l’effet de masque des objets et personnes sur scène. Le logiciel incorporé dans les puces du kit de développement filtrent déjà les réflexions de ces ondes radios, mais des sauts de position persistent tout de même. Il sera bon d’appliquer un filtrage pour lisser plus ou moins les informations de position.
À suivre la liste des composants dont vous aurez besoin.
