Que l’on ait un système de radar pour effectuer le suivi automatique des sources au plateau ou que l’on ait des moyens plus limités, il est bon de se poser quelques questions sur les algorithmes qui font varier les délais.
Tout d’abord lorsqu’on fait varier une ligne de retard numérique il faut veiller à utiliser un algorithme qui interpole les valeurs sinon on obtient des craquements car le signal discontinu. Il existe plusieurs algorithmes communs pour interpoler les valeurs intermédiaires. Par exemple :
- linéaire qui trace une droite entre les valeurs des samples de part et d’autre de la valeur à interpoler,
- cubique qui trace une courbe polynomiale qui correspond le mieux à la courbe sur un ensemble de 4 samples.
Ensuite la variation du délai qu’il soit analogique ou numérique va modifier la hauteur des sons. Lorsqu’une source se rapproche, on va réduire le délai. Plus la source se rapproche vite et plus le changement du délai va être marqué. Dans ce cas, on obtient un effet Doppler comme lorsque dans la rue une ambulance approche. Et inversement lorsque la source s’éloigne la hauteur va baisser. Souvent ces artefacts dans le calcul font sortir de l’écoute, à moins que ce ne soit un effet de composition électroacoustique.
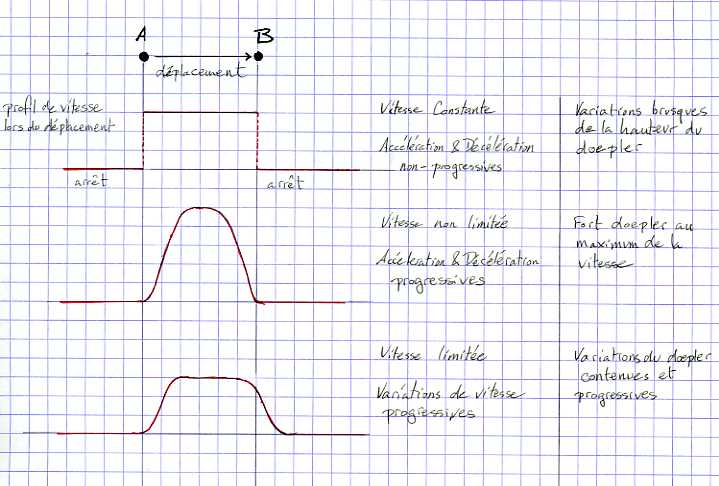
Lorsque la variation est très importante il peut être plus simple de faire un crossfade entre les deux retards plutôt que d’avoir un un drôle de son qui fait « zwiiip ». Dans ce cas le système doit être capable de lire dans les boucle de retard à deux endroits simultanément lors de la transition.
Autrement si on veut minimiser l’effet Doppler il faut limiter le taux de variation des lignes de retard. Lorsque le mouvement démarre et si on fait un suivi toutes les 20 à 100ms par exemple on va se retrouver avec des taux de variations des délais qui changent segment par segment. On recrée de cette façon là du jitter. Cela à pour effet de durcir les timbres puisqu’ils changent sans transition. Il faut donc lisser là aussi.
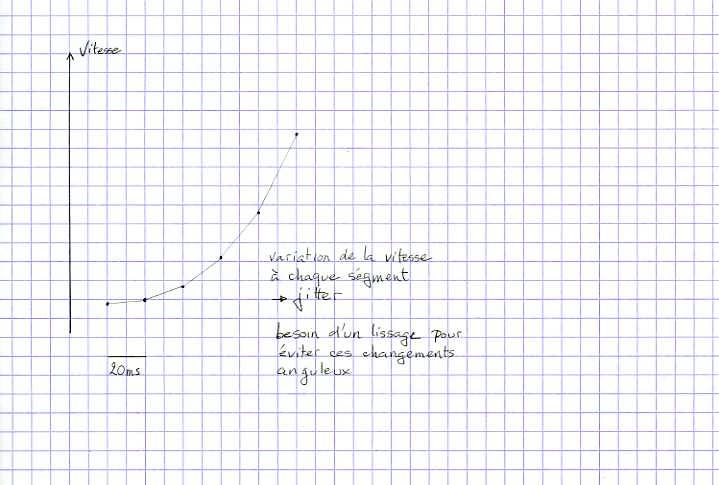
Pour cela on peut passer par un modèle de masse-ressort avec frottements fluides (qui dépendent de la vitesse). En effet ce modèle peut donner une mise en action douce et un ralentissement en arrivant proche de la destination. De plus en travaillant le facteur de friction qui dépend de la vitesse on pourra limiter celle-ci. Ce facteur correspond pour un saut en chute libre dans l’air à la vitesse maximum que l’on peut atteindre à cause des frottements aérodynamiques.
Pour finir ce modèle permet de mettre à jour en permanence la consigne de position tout en maintenant la vitesse et en la faisant varier en douceur.
Une autre approche est de limiter la vitesse et les variations de vitesse en calculant le vecteur entre la position actuelle et la position visée. Si on met à jour la position toutes les 20ms on peut limiter la vitesse à l’aide d’une courbe asymptotique telle que tangeante hyperbolique.
